Deep reinforcement learning for collaborative robotics
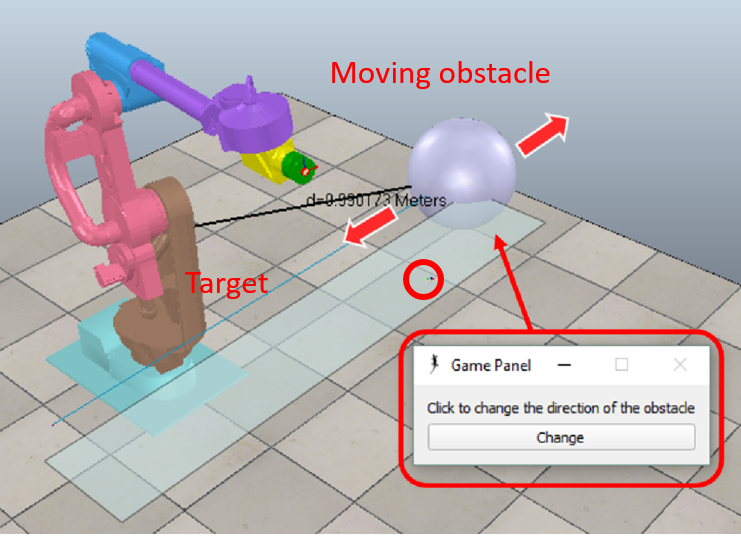
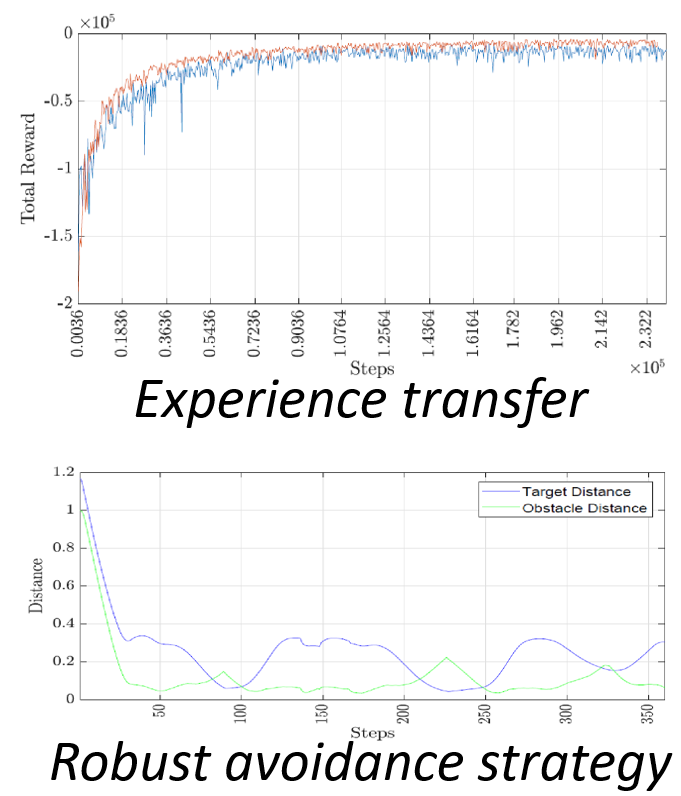
The project was focused on incremental autonomous learning, experience transfer, and robust avoidance strategy, with the virtualization of a real‐world robot to learn reaching a target while avoiding obstacles in a simulation environment.
Virtualization of a real‐world robot: 3D mesh > movable parts > joints and direct kinematic chain
Learning to reach a target while avoiding obstacles in a simulation environment with incremental autonomous learning, with experience transfer and robust avoidance strategy:
Related publications
Bianca Sangiovanni, Gian Paolo Incremona, Marco Piastra, Antonella Ferrara (2020). Self-Configuring Robot Path Planning With Obstacle Avoidance via Deep Reinforcement Learning, in IEEE Control Systems Letters, pp.(99):1-1, DOI: 10.1109/LCSYS.2020.3002852
Bianca Sangiovanni, Gian Paolo Incremona, Antonella Ferrara, Marco Piastra (2019). Deep Reinforcement Learning Based Self-Configuring Integral Sliding Mode Control Scheme for Robot Manipulators, 57th IEEE Conference on Decision and ControlAt, Miami Beach, FL (USA), DOI:10.1109/CDC.2018.8619843.
Bianca Sangiovanni, Angelo Rendiniello, Gian Paolo Incremona, Antonella Ferrara, Marco Piastra (2018). Deep Reinforcement Learning for Collision Avoidance of Robotic Manipulators, 17th European Control Conference, Limassol, Cyprus, DOI:10.23919/ECC.2018.8550363.
Laboratorio di Visione Artificiale e Multimedia
Dipartimento di Ingegneria Industriale e dell’Informazione
Università di Pavia
Via Ferrata 5, 27100 Pavia - ITALY